


2022年12月14日上午10点,课题组成员在腾讯会议线上会议室开展了本学期第四次学术交流会议,共25位同学和3位老师线上参加。本次会议由张浩同学主持,金宇宁和张浩两位同学进行学术汇报。
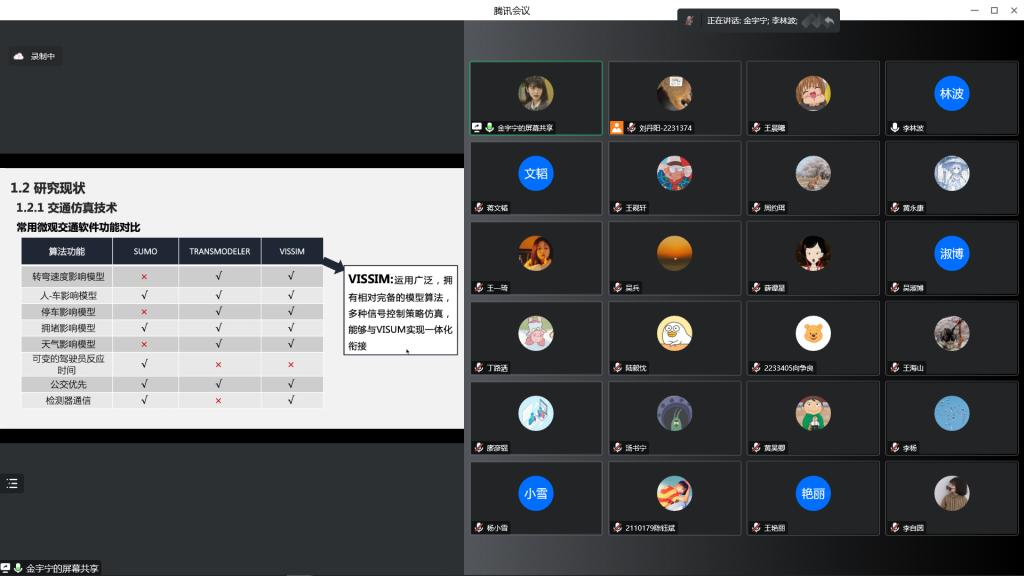
首先是金宇宁同学在线上汇报《基于仿真的宏微观一体化小汽车交通影响评价指标研究》,汇报包括研究现状与意义、研究内容、案例应用三个部分。该研究旨在减少不合理的城市用地开发,减少交通拥堵、环境污染等现象,进而精细化管理交通,完善传统的交通影响评价指标,最终基于仿真建立多维度、综合的交通影响评价指标体系。汇报中指出交通仿真技术的发展依赖于计算机技术,经历了一个早期缓慢、后期迅速的历程,发展趋势为宏观到微观、单尺度仿真到多尺度仿真。比较了现有的常用微观交通软件,证实VISUM-VISSIM组合的可行性和优势性,但其在交通需求和影响研究上应用较少,尚未形成完整、系统的框架体系,具有较大的应用潜力。研究内容中报告了VISUM和VISSIM的参数设置,包括自由流车速、期望速度分布、驾驶行为参数。在研究中选择了多个评价指标,包括路网和路段/交叉口的通畅性、均衡性、安全性、环境友好性。在报告的最后举出了应用案例,与上文的评价指标结合,展示了案例地区在宏微观项目之后的指标变化情况。
针对金宇宁同学的汇报内容,李林波老师进行了相关的提问与建议,金宇宁同学对问题进行了回复。
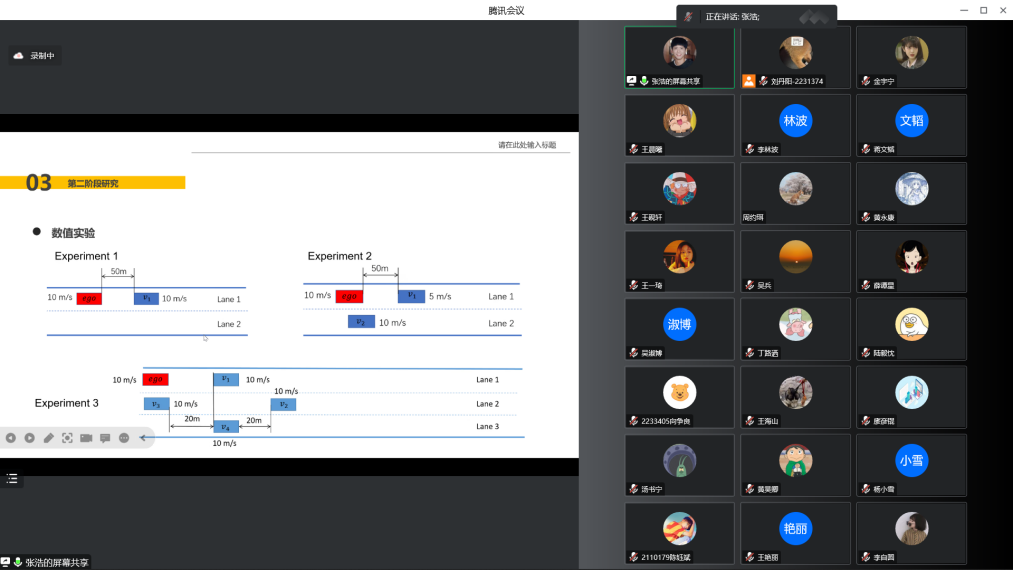
接下来是张浩同学线上汇报内容《基于深度强化学习的车辆换道控制》,本次汇报从开题回顾、第一阶段研究、第二阶段研究和接下来的研究计划四个部分进行。该研究的研究目标及意义是为了能在真实的驾驶场景中自动驾驶完全代替人工驾驶,自动驾驶行为的建模需要考虑跟驰行为和换道行为之间的相互影响。本研究希望通过深度强化学习来同时建模跟驰行为和换道行为,使得模型可以在换道成功率、通行效率、安全性等方面相比于原来的独立模型有更好的表现。汇报指出研究通过深度强化学习方法同时建模跟驰行为和换道行为,考虑两者之间的相互影响,使得控制策略更加符合人类的驾驶习惯。并且在强化学习模型中引入 Deep Sets 结构来处理自动驾驶控制模型中不确定维度的输入,即本车周围动态变化的环境信息。另外通过 SUMO 仿真软件验证所提出模型的效果,期望所提出的模型能够在换道成功率、通行效率、安全性能方面能够表现良好。在下一步研究计划中预计对模型进行改善,同时继续训练强化学习算法。
针对张浩同学的汇报内容,李林波老师和王艳丽老师对其进行了相关的提问与建议,张浩同学一一解答了提出的问题。
